Osoba kontaktowa : Lanbooxie
Numer telefonu : +86 15527360208
WhatsApp : +8615527360208


| Minimalne zamówienie : | 1 | Cena : | Negotiation |
|---|---|---|---|
| Szczegóły pakowania : | Walizka na garnitur 450*365*200mm | Czas dostawy : | 5-7 dni roboczych |
| Zasady płatności : | T / T, Western Union | Możliwość Supply : | 30 zestawów / miesiąc |
| Miejsce pochodzenia: | Chiny | Nazwa handlowa: | Geosun |
|---|---|---|---|
| Orzecznictwo: | CE, ISO | Numer modelu: | Mobilny system skanujący LiDAR GS-130X |
|
Szczegóły informacji |
|||
| Zakres: | Krótki zasięg 70 - 100 m | Aplikacja: | Inteligentna budowa miasta |
|---|---|---|---|
| Funkcja: | Inteligentne i wydajne rozwiązanie Lidar | FOV: | 360 stopni |
| High Light: | 100V Velodyne Laser Mobile LiDAR System,GS 100V Mobile LiDAR,powietrzny system lidar gAirHawk |
||
opis produktu
Mobilne rozwiązanie do mapowania mostów HESAI Mechaniczny LiDAR
System skanowania LiDAR firmy Geosun gAirHawk serii GS-130X
gAirHawk GS-130X to rodzaj kompaktowego systemu akwizycji danych chmury punktów LiDAR krótkiego zasięgu, zintegrowanego kanałowego skanera laserowego HESAI XT32, systemu pozycjonowania i określania położenia GNSS i IMU oraz jednostki sterującej pamięcią, jest w stanie w czasie rzeczywistym, dynamicznie, masowo gromadzić bardzo precyzyjne dane chmur punktów i bogate informacje o obrazach.Jest szeroko stosowany w pozyskiwaniu informacji przestrzennych 3D w geodezji, elektryczności, leśnictwie, rolnictwie, planowaniu przestrzennym.
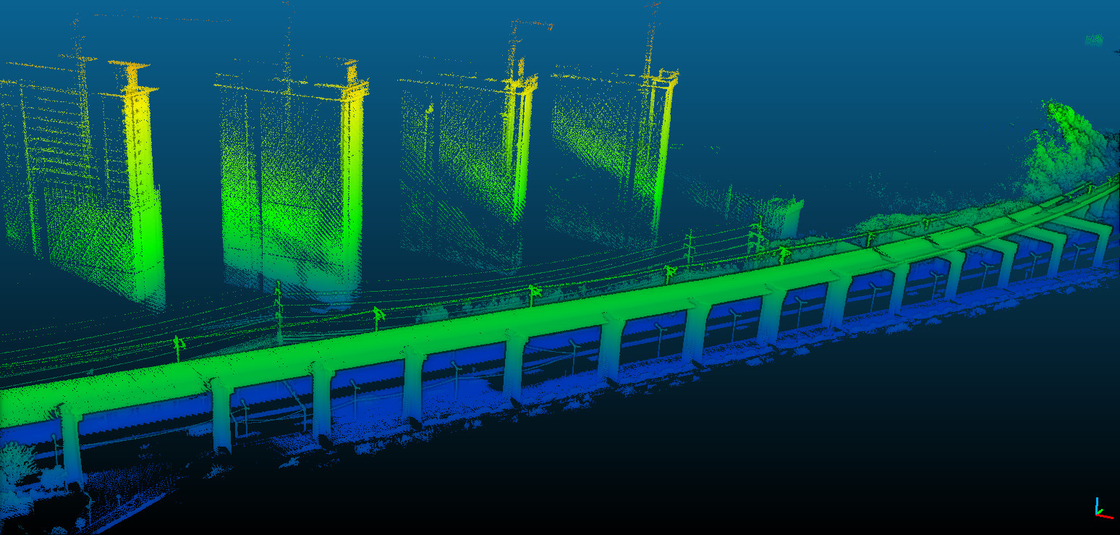
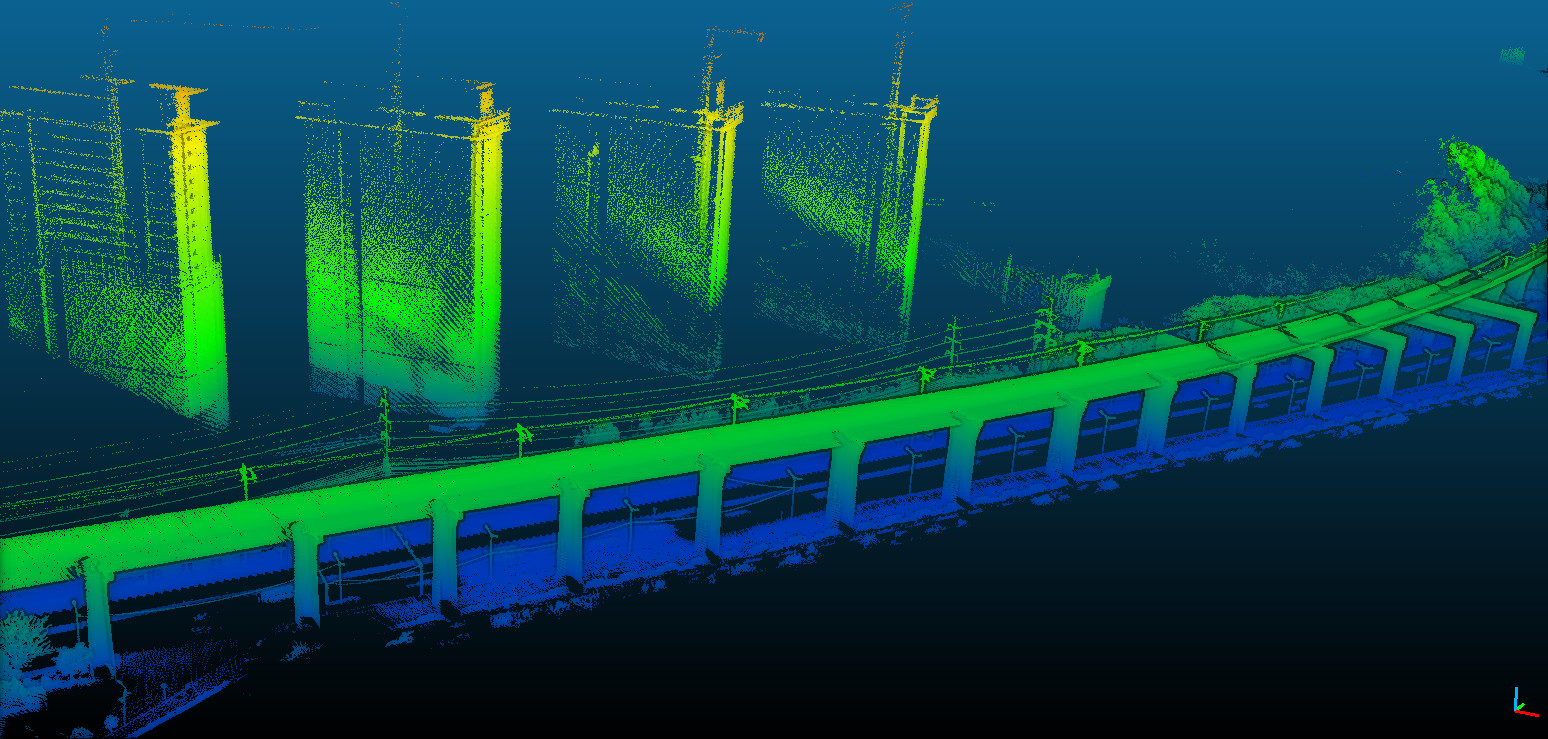
Zastosowanie mobilnego rozwiązania mapującego LiDAR GS-130X
![]()
![]()
![]()
Bezpłatne oprogramowanie próbne mobilnego systemu skanującego LiDAR GS-130X
Wytyczne dotyczące użytkowania LiDAR i odniesienia.pdf
Oprogramowanie do wstępnego przetwarzania chmury punktów zintegrowane z przetwarzaniem trajektorii ---- Geosun Samodzielnie opracowany gAirHawk 5.0
Kluczowe cechy oprogramowania gAirHawk 5.0
1. Surowe dane: inteligentnie ładuj
2. Cztery domyślne współrzędne
3. Optymalizacja chmury punktów
4. Rozpocznij i zatrzymaj obliczenia
Bezpłatny test próbny, osiągnij wysoką precyzję
![]()
![]()
Specyfikacja mobilnego systemu skanującego LiDAR GS-130X
| Mobilny LiDAR gAirHawk GS-130X | ||
| Nazwa przedmiotu | Parametry systemu | |
|
Parametry |
Waga | 1,26 kg |
| Dokładność pomiaru | Mniej niż 0,1 m przy 120 m | |
| Temperatura pracy | -20℃~+65℃ | |
| Zakres mocy | 12 V-24 V | |
| Konsumpcja | 10 W | |
| Platforma nośna | Dron i pojazd | |
| Składowanie | 64 GB pamięci masowej, maksymalna obsługa karty TF o pojemności 128 GB | |
|
Jednostka Lidar
|
Skala | 0.3m-120m przy 10% współczynniku odbicia |
| Klasa laserowa | 905 nm klasa 1 (IEC 60825-1:2014) | |
| Kanał | 32-kanałowy | |
| Dokładność zasięgu | ±1 cm (wartość typowa) | |
| Częstotliwość skanowania | 10 Hz, 20 Hz | |
| dane | Podwójne echo 640 000 punktów/sek | |
| FOV | 360°, regulowany | |
| Czujnik laserowy | HESAI XT32 | |
| Jednostka POS | Częstotliwość aktualizacji | 200 Hz |
| Dokładność kursu | 0,040° | |
| Dokładność skoku | 0,015° | |
| Dokładność toczenia | 0,015° | |
| Dokładność pozycji | ≤0,05m | |
| typ sygnału GNSS | GPSL1/L2/L5 GLONASSL1/L2 BDS B1/B2/B3 GAL E1/E5a/5b | |
| Oprogramowanie do wstępnego przetwarzania | oprogramowanie POS | Informacje wyjściowe: pozycja, prędkość, położenie |
| Oprogramowanie do chmury punktów | Wyjściowy format danych chmury punktów: format LAS, niestandardowy format TXT | |
| Aparat (wbudowany) | FOV | 83 stopnie |
| Efektywny piksel | 26 megapikseli | |
| Ogniskowa (mm) | 16 | |
Pakiet mobilnego systemu skanującego LiDAR GS-130X
Mobilny system skanujący LiDAR GS-130X jest pakowany w walizkę z wkładką z materiału EVA wewnątrz, a następnie przykryty twardym pudełkiem kartonowym.Nadaje się do transportu lotniczego i morskiego.
![]()
![]()
Wpisz swoją wiadomość
| Wuhan Geosun Navigation Technology Co., Ltd |
| 4F, Building D, Tianyi plaza No.8 West Maodianshan Road, East Lake Hi-tech Zone Wuhan City, Chiny |
| +86--15527360208 |
| sales@geosunlidar.com |